
Feedback
- Testo
- Bibliografia8
- Voci correlate
Autore: Franco Lever
1. Il termine
L’espressione inglese associa un verbo e un avverbio: to feed significa ‘alimentare’, back ‘all’indietro’. È un termine tecnico nato nell’ambiente degli studi relativi al funzionamento dei sistemi omeostatici, in grado cioè di mantenere un certo status nonostante sollecitazioni contrarie; associa indissolubilmente l’idea di ritorno di informazione a quella di controllo sul sistema.Il primo a introdurre il concetto di f. nella letteratura scientifica è stato lo scienziato inglese J. C. Maxwell, il quale nel 1868 pubblicò uno studio sui sistemi automatici (governor), in cui metteva in evidenza come essi fossero in grado di autocorreggersi proprio grazie al ritorno di informazione. In questo modo anticipava un concetto che arriverà a maturazione solo settant’anni dopo, per opera del gruppo di scienziati che lavorava con Norbert Wiener. Questi nel 1948, nel proporre una nuova scienza, "la scienza della comunicazione e del controllo", volle rendere omaggio agli studi anticipatori di Maxwell e la chiamò cibernetica (dal greco kybernetiké téchne, ‘arte del governare’, a cui si collega il termine inglese governor).
In ambiente italiano molti preferiscono usare la parola originale per garantire la specificità del concetto e il riferimento al contesto scientifico di origine; altri optano per la sua traduzione ‘retro-alimentazione’, quantunque l’espressione non sia proprio elegante; altri ancora usano la parola ‘risposta’, ma così facendo finiscono per svuotare il termine del suo significato più originale: esso infatti non indica qualsiasi tipo di risposta, ma solo quella che il sistema utilizza come controllo.
Ad esempio vengono a volte definiti f. i segni di stanchezza e di insoddisfazione di un uditorio nei confronti di chi parla. In realtà essi possono dirsi tali soltanto nel caso in cui riescono a condizionare l’emittente, tanto da fargli modificare l’azione. Se invece la situazione non ha queste caratteristiche, se cioè il contesto comunicativo non è tale da accordare al ricevente alcun potere di intervento sull’azione dell’emittente, è del tutto fuori luogo parlare di f. Come si vedrà, c’è f. solo quando le informazioni raccolte all’ output controllano l’ input.
2. Il concetto
Per f. si intende un segnale che permette a un sistema di regolare la propria azione sulla base dei risultati ottenuti: se questi si discostano da parametri prefissati, il sistema è in grado di modificare opportunamente il proprio funzionamento così da ottenere il risultato programmato. Inteso in questo modo il f. è sicuramente l’elemento caratterizzante un circuito intelligente (cibernetico).Ci sono due tipi di feedback: il f. è negativo quando agisce in modo che il sistema funzioni sempre allo stesso modo, entro margini controllati di tolleranza (in questa caso nega le eccessive variazioni); viene invece detto positivo il f. che mantiene il sistema in continuo cambiamento (conferma le variazioni) Per visualizzare il concetto vengono presentati due grafici, che a prima vista sembrano tra loro identici. Al centro dello schema c’è un rettangolo con la parola inglese ‘scatola nera’ per dire due cose, entrambi assai importanti:
– allo studioso che analizza il procedimento non interessa come sia costruita la macchina che agisce in un certo modo, tanto da rinunciare – per così dire – a guardarci dentro: si limita a studiarne il comportamento;
– si tratta di un modello teorico, che rappresenta in astratto tutti i sistemi che funzionano alla stessa maniera.
Dall’esterno il sistema riceve dell’energia (l’input), la elabora e fornisce dei risultati (l’output). È a questo punto che interviene l’azione del f. o per garantire l’omeostasi del sistema o per accelerarne la variazione.
3. F. negativo
Nel caso del f. negativo il sistema è in grado di modificare il suo funzionamento quando non sta ottenendo l’output previsto: se l’output è eccessivo (+), parte di questa energia viene usata per intervenire sull’input in modo da ridurlo (–); se invece l’output non è sufficiente (–) il f. determina un aumento dell’input (+). Viene detto negativo proprio perché l’azione sull’input è sempre di segno contrario a quanto sta avvenendo all’output.Tavola 1
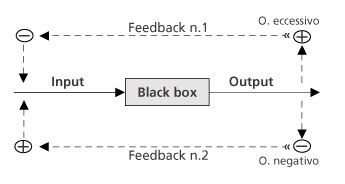
Questo tipo di f. mantiene un sistema in condizioni costanti, entro i limiti di oscillazione pre-stabiliti: il sistema viene detto omeostatico. In natura gli esempi sono numerosissimi: il corpo umano mantiene la temperatura interna attorno a 37 gradi centigradi: se la temperatura si abbassa, l’organismo mette in funzione delle strategie in grado di alzarla e viceversa; la dilatazione della pupilla nei nostri occhi è regolata sulla quantità di luce utilizzata/sopportata dalla retina: se c’è poca luce la pupilla tende a dilatarsi, se ce n’è troppa si restringe (se poi questa riduzione non basta, il cervello comanda altre strategie: dalla chiusura delle palpebre agli occhiali scuri); anche gli alberi – i pini, ad esempio – funzionano in questo modo per controllare la luce da assorbire in funzione del processo clorofilliano: quando c’è troppa luce (d’estate) i loro aghi schiariscono fino a un colore grigio-verde (il colore chiaro respinge la luce), mentre d’inverno diventano verde cupo, quasi nero (il nero assorbe tutte le radiazioni luminose).
4. F. positivo
Tavola 2
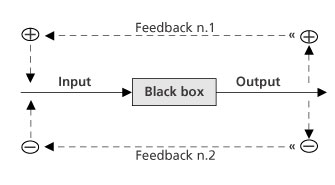 Quando il sistema di autoregolazione, invece di mantenere una situazione di equilibrio, accelera il cambiamento, si parla di f. positivo. In questo caso il segnale di ritorno non riduce la variazione in corso ma la conferma, la sostiene ulteriormente. La rappresentazione grafica (vedi tavola 2) è esattamente la stessa di prima, salvo un particolare importante: all’aumentare dell’output (+) corrisponde ora un intervento (f. n. 1) che fa aumentare ancor di più l’input (+), cosicché l’output cresce ancora con un effetto cumulativo; se invece (f. n. 2) l’output diminuisce (–), l’azione di controllo fa sì che l’input diminuisca (–), sostenendo ulteriormente la tendenza a diminuire. (Si verifica un effetto a f. positivo in un sistema economico a libero mercato quando l’eccessiva disponibilità di moneta porta alla sua svalutazione: ogni aumento di denaro in circolazione, determina un aumento dei prezzi.)
Quando il sistema di autoregolazione, invece di mantenere una situazione di equilibrio, accelera il cambiamento, si parla di f. positivo. In questo caso il segnale di ritorno non riduce la variazione in corso ma la conferma, la sostiene ulteriormente. La rappresentazione grafica (vedi tavola 2) è esattamente la stessa di prima, salvo un particolare importante: all’aumentare dell’output (+) corrisponde ora un intervento (f. n. 1) che fa aumentare ancor di più l’input (+), cosicché l’output cresce ancora con un effetto cumulativo; se invece (f. n. 2) l’output diminuisce (–), l’azione di controllo fa sì che l’input diminuisca (–), sostenendo ulteriormente la tendenza a diminuire. (Si verifica un effetto a f. positivo in un sistema economico a libero mercato quando l’eccessiva disponibilità di moneta porta alla sua svalutazione: ogni aumento di denaro in circolazione, determina un aumento dei prezzi.)
La cibernetica muoveva i primi passi nei laboratori militari all’inizio degli anni Quaranta. Tra gli scienziati che lavoravano per gli alleati c’era anche il gruppo guidato da Norbert Wiener, con il compito di ottimizzare l’efficacia della difesa antiaerea. A questo scopo venne studiato un algoritmo che consentisse a un meccanismo di utilizzare al meglio le informazioni disponibili, in modo da ottenere il risultato prefissato. Nel caso specifico l’automatismo doveva essere in grado di calcolare la posizione futura di un aereo a partire dai dati – forniti dal radar – relativi alla velocità e alla traiettoria dell’aereo nemico e quindi orientare il sistema di puntamento antiaereo.
Le ricerche di Wiener in parte erano analoghe a quelle di Shannon (come garantire la trasmissione di un segnale in un circuito disturbato), mentre del tutto innovativo era il modello ad auto-correzione che veniva progressivamente compreso nel suo funzionamento e nella sua applicabilità a tutti i sistemi complessi, in particolare al comportamento umano.
5. Origine e importanza
Quando – negli anni Quaranta – l’idea e il termine vennero proposti, costituirono una assoluta novità. In nuce il sistema a f. negativo rappresentava il modello con cui studiare la realtà: non più soltanto materia, non più soltanto energia, ma anche comunicazione. Questo nuovo punto di vista, proposto dalla cibernetica, prendeva in considerazione non i mutamenti e gli scambi chimici o energetici, quanto invece i flussi di segnali, che hanno la doppia funzione di comunicazione e di controllo e rendono possibile a determinati sistemi complessi (come sono tutti gli organismi viventi) il comportamento teleologico, il tipo di azione che persegue uno scopo preciso.La cibernetica muoveva i primi passi nei laboratori militari all’inizio degli anni Quaranta. Tra gli scienziati che lavoravano per gli alleati c’era anche il gruppo guidato da Norbert Wiener, con il compito di ottimizzare l’efficacia della difesa antiaerea. A questo scopo venne studiato un algoritmo che consentisse a un meccanismo di utilizzare al meglio le informazioni disponibili, in modo da ottenere il risultato prefissato. Nel caso specifico l’automatismo doveva essere in grado di calcolare la posizione futura di un aereo a partire dai dati – forniti dal radar – relativi alla velocità e alla traiettoria dell’aereo nemico e quindi orientare il sistema di puntamento antiaereo.
Le ricerche di Wiener in parte erano analoghe a quelle di Shannon (come garantire la trasmissione di un segnale in un circuito disturbato), mentre del tutto innovativo era il modello ad auto-correzione che veniva progressivamente compreso nel suo funzionamento e nella sua applicabilità a tutti i sistemi complessi, in particolare al comportamento umano.
Foto
Non ci sono foto per questa voce
Video
Non ci sono video per questa voce
Bibliografia
- ASHBY William R., Progetto per un cervello, Bompiani, Milano 1970.
- POERTNER Shirley - MASSETTI MILLER Karen, L’arte di dare e ricevere feedback. Come realizzare un’efficace comunicazione interpersonale per migliorare la performance individuale e di gruppo, Franco Angeli, Milano 1999.
- ROSSI Paolo Aldo (ed.), Cibernetica e teoria dell’informazione, La Scuola, Brescia 1978.
- SHANNON Claude E., Calcolatori e automi in SOMENZI Vittorio (ed.), La filosofia degli automi, Boringhieri, Torino 1965.
- TUSTIN Arnold, Controreazione in Controllo automatico. Automazione, A.Martello Editore, Milano 1956, pp.12-29.
- WIENER Norbert - ROSENBLUETH Arturo - BIGELOW Julian, Comportamento, fine e teologia in ROSSI P. A. (ed.), Cibernetica e teoria dell'informazione, La Scuola, Brescia 1978.
- WIENER Norbert, La cibernetica. Controllo e comunicazione nell'animale e nella macchina, Il Saggiatore, Milano 1968.
- WISDOM J. O., L'ipotesi della cibernetica in ROSSI P. A. (ed.), Cibernetica e teoria dell'informazione, La Scuola, Brescia 1978.
Documenti
Non ci sono documenti per questa voce
Links
Non ci sono link per questa voce
Note
Come citare questa voce
Lever Franco , Feedback, in Franco LEVER - Pier Cesare RIVOLTELLA - Adriano ZANACCHI (edd.), La comunicazione. Dizionario di scienze e tecniche, www.lacomunicazione.it (01/08/2025).
Creative Commons Attribuzione-Non commerciale-Condividi allo stesso modo
514